發布日期:2022-04-22 點擊率:59
摘 要:鋼簾線并捻機合股并捻以后要用過捻器去除簾線徑向內應力,消除殘余扭轉,過捻器的轉速控制是去應力控制的關鍵。丹佛斯的運動控制器有很強的用戶定制編程功能和高精度的同步控制特性。本文介紹了采用丹佛斯運動控制器解決去應力控制難題的辦法和經驗。
關鍵詞: 過捻 去應力 同步控制 張力
引言:中國目前已經是世界上最大的子午線輪胎用鋼簾線生產國,由于行業競爭激烈,國內的大型鋼簾線制造企業現在一般多自己研制鋼簾線生產設備。其中CDT410W型并捻機是較為先進的股繩機,不僅車速高,還集成了外繞功能。其中有一項工藝很難掌握,即鋼簾線合股并捻以后的軸向去應力控制。作者憑多年生產實際經驗,利用丹佛斯運動控制器的優異控制性能,成功地解決了這個問題,大大提高了產品的質量和設備的生產效率。
一、 CDT410W并捻機過捻器的工作原理:
圖一為CDT410W并捻機的基本機械構造框圖。
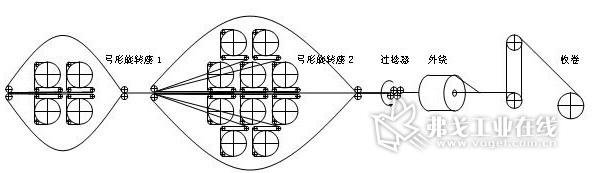
圖一、CDT410并捻機結構圖
CDT410W為兩級串聯式內放外收型并捻合股機,旋轉座1繞制的簾線能作為芯線再被旋轉座2的鋼絲外包捻合,能繞制復雜結構鋼簾線。并捻合股后的鋼簾線然后通過過捻器去應力,再被外繞,最后以成品進入收卷機。
從過捻器的工作原理可以發現過捻器的功能相當于紡紗工藝中的假捻器,即過捻器之前端鋼簾線由于過捻器的旋轉加捻作用,其捻度T’為:
T’ = ( 1 + λ) T
(根據文獻1推導) 其中,T為并捻機設定的捻度
λ為過捻速比,即過捻器與主機的轉速比
鋼簾線從過捻器出來以后會立即減去λT的捻度,最后總捻度保持T不變,所以過捻器的轉速不影響鋼簾線的最終捻度,但他能改變其前段鋼簾線的捻度,因此可以用于去應力控制。鋼簾線加捻以后的彎曲和扭轉變形可表示為:

(根據文獻1) 式中: t — 捻距,毫米
D — 過捻時該層鋼絲的外徑,毫米
d — 單根鋼絲的外徑,毫米
p— 該層鋼絲的彎曲曲率半徑,毫米
&— 該層鋼絲的單位長度扭轉角,弧度
從鋼簾線的應力公式可以發現,捻距越小,簾線的變形越大,而扭矩與捻度成反比,因此有結論捻度越大變形越大。這樣過捻器前段簾線是過度變形的,經過過捻器以后恢復正常變形。對于特定形狀,特定材料的鋼簾線,在特性溫度和特定軸向張力條件下,消除簾線殘余應力的效果只與過變形的程度有關,要使過變形的程度保持不變,需且只需保持過捻速比λ不變。所以過捻器的控制應該是角度同步控制。
二、 丹佛斯運動控制器的功能:
丹佛斯運動控制器上的接口端子如右圖所示:

X55為編碼器2輸入接口,缺省用于連接從電機編碼器;
X56為編碼器1輸入接口,缺省用于連接主電機編碼器;
X57為10數字量輸入接口;
X58為24VDC電源;
X59為8數字量輸出接口。
(根據文獻2)
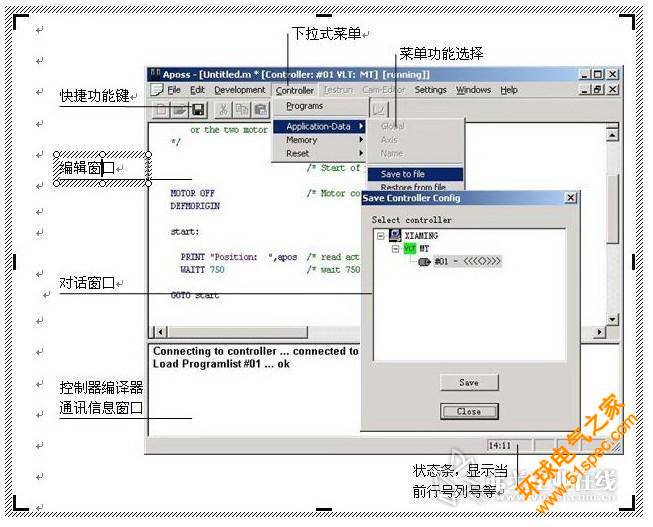
丹佛斯運動控制器的編程方式
丹佛斯運動控制器使用丹佛斯公司開發的Aposs運動控制語言,其編程風格模仿C語言,并提供多種便利指令,其界面如下圖所示: (根據文獻3)
丹佛斯運動控制器能提供如下基本功能:
1. 輸入輸出邏輯控制功能;
2. 同步控制功能,如角度同步,速度同步,電子凸輪;
3. 主從同步速比調節;
4. 中斷功能,如時間中斷,I/O中斷等;
5. 基本數學運算功能
……
三、 丹佛斯運動控制器在過捻控制中的應用:
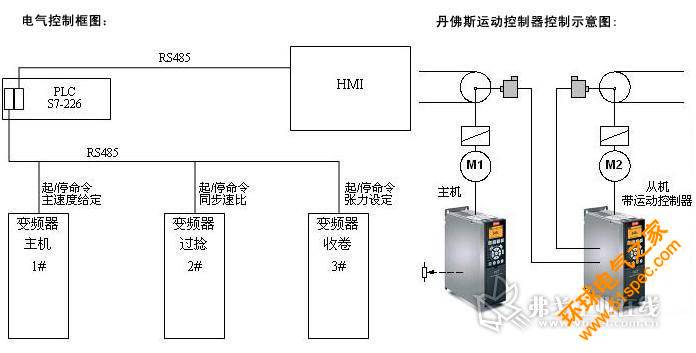
丹佛斯運動控制器控制示意圖如右:
主機即為主傳動變頻器;
主機電機上安裝編碼器作為運動控制器主編碼器接口的輸入;
從機即為過捻器,運動控制器的控制邏輯保證過捻器轉過的角度與主機轉過的角度嚴格滿足用戶設置的速比關系,速比可以作為變頻器的標準參數通過RS485通訊口,由上位控制PLC設置。
丹佛斯運動控制器程序例(部分):
main:
if in 32 then
if f_motoron==0 then
motor on
f_motoron=1
endif
if f_syncp==0 then
syncp
fsyncp=1
endif
out 1 1
else
f_syncp=0
f_motoron=0
motor off
endif
goto main
(參照文獻3)
其主體程序為“SyncP”角度同步控制宏指令,加上輔助控制命令。另外考慮到加減速時鋼簾線的張力發生變化,還要作相關處理。
運行效果:
系統實際運行效果非常理想,對同一種線材,在多種線速度條件下,用同一速比就能保證在加速勻速減速的全部階段的去應力效果,減少了以前繁瑣的參數設置步驟,大大提高了生產效率。結束語: 鋼簾線并捻機過捻去應力控制提出了同步控制的要求,丹佛斯運動控制器的強大功能保障了同步控制的精度,其編程功能的靈活性提高了整機的性能和設備的運行效率,值得在鋼簾線生產企業推廣。
參考文獻
[1] 鋼絲雙捻時的變形特點. 金屬制品. ISSN 1003-4226. 1990年16卷6期. 13-15
[2] 運動控制器MCO305使用說明. MG.33.K2.02. Danfoss A/S. 2007
[3] 運動控制器MCO305設計指南. MG.33.L2.02. Danfoss A/S. 2007
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


