發布日期:2022-04-18 點擊率:45
小批量生產加工企業經常需要變化生產流程,這樣常常會因此影響中小型企業使用機器人技術的經濟性。為此,人們研發出了一種能夠快速和直觀實施的新程序化或是調整原有程序的編程系統,使用該系統可使操作人員可直接與機器人進行互動。
今天,很多生產流程借助工業機器人實現了自動化。在使用中,借助編碼控制程序實現工業機器人運動和控制工具的自動化生產流程。通常,該過程在企業投入生產的時間點便根據生產的需求一次性進行設置,且在整個生產過程中保持不變。由于嚴格完成編程且程序具有高重復精確度,所以在大批量部件的加工作業以及整套加工作業過程中,機器人能夠如其在工業自動化那樣確保穩定的生產工序。
通過降低加工工件個數實現多個生產運行過程
加工企業的產量越高,具體到每個單件產品的投入也就越低。目前,日益增加的發展趨勢是加工工件的增加品種不斷增加,相同的加工工件的數量在不斷減少,這樣在自動化生產中加工制造生產成本在不斷加大。這對于中小型企業(KMU)來說便面臨著雙重成本壓力。一方面,中小型企業接到定單的工件加工件數量少,而另一方面,要完成這樣的工件加工任務對企業工作人員的技術水平要求更高。那么,人們在考慮,中小型企業為了實現自動化生產購置機器人生產單元已經進行的高投資,盡管從技術的角度看,機器人生產單元在技術層面很有必要,但是從整個加工生產來看這樣做并不經濟。
提高中小型企業工業機器人生產的關鍵在于,對機器人實現簡單的編程,以便那些沒有經過機器人編程培訓的工作人員能夠快速學會如何實現機器人編程并能夠在生產中實現。而今天,機器人編程是一個必要的協調系統思維過程,需根據生產廠家和機器人的動力機械學原理并結合生產企業的機器設備的具體情況才能實現機器人的編程,因此機器人編程帶有濃烈的數學色彩。

圖1 操作人員既可用工作環境的幾何模式也可用現實的機器人生產單元記住機床工具的定位數據,然后以這些數據為基礎自動化設置機器人程序
焦點是提高操作的直觀性
順列性錯誤,也就是由于缺乏生產企業工業機器人程序化語言方面的知識而犯下的錯誤是能夠自動識別的,部分錯誤也是能夠排除的;而由于運動命令的錯誤鏈接而產生的邏輯性錯誤,通常是不能識別且會引起沖突和導致生產人員人身危險。需根據工業機器人的具體應用目的,為生產人員投入高昂的培訓費用。現在盡管工業機器人的銷售數量在增多,但在機器人用戶范圍內,也只有少數大型企業和重要行業在購置機器人時便要求為機器人研發投產使用和操作的技術方案。
為了實現機器人運動的高靈活性,同時也是為了在新的工業領域,特別是在中小型企業(KMU)能夠實現機器人運動的高靈活性,近20余年來,德國亞琛(Achen)工業大學(RWTU)的機床實驗室(WZL)一直在研究和試驗設備技術方案和編程方法。該研究和試驗的重點特別放在操作的直觀性方面,目的是使沒有受過專業培訓的人能夠容易的學會編程方法。因此,隨著Prodemo研發出機器人編程系統,以使操作人員能夠直接與機器人互動。

圖2 Prodemo-System機器人編程系統的部件
這種從本企業實際出發的機器人編程方案建立在展示性編程理念上。在此,由傳感器監測操作人員的動作并直接將操作人員的動作轉換至機器人的動作中(圖1)。操作人員得到一個直接的反饋并將機器人設置到理想的位置。因為機器人的動作始終是按照操作人員的動作變化的,所以傳統的機器人相互協調系統的理念便不起作用,這樣便不會出現操作人員難以估計機器人的運動方向,特別是機器人開始動作時的運動方向,從而排除了在進行機器人編程時,操作人員在機器附近經常發生的人與機器設備的沖突。
操作人員的動作被直接轉化為機器人的動作
Prodemo出發對機器人進行編程的結果也跟采用傳統的機器人編程的方法一樣,以編碼的形式出現,這樣在生產運行的過程中,不會改變機器人設備的運行準確性和耐用性。系統操作的必要部件如圖2所示,由一個運動引導裝置(BFG)、一個紅外線跟蹤系統、一個貫性傳感器以及一個工業機器人專用適配凸緣組成。
無論是BFG還是專用適配凸緣均有光學的紅外線顯示,通過紅外線跟蹤系統進行識別并準確的檢測其在空間的位置和運動方向。這樣,不具備機器人專業知識的操作人員便可將直觀動作直接轉換為機器人動作。通過BFG上的一個確認鍵來實現機器人動作引導的執行。此外,也是通過BFG來實現機器人的其他功能。BFG存儲著各個不同的安全功能和緊急斷閘開關以及如機器人夾鉗開啟/關閉或支承點等作業程序操作功能。
紅外跟蹤系統的位置可自由選擇
原則上,顯示系統結構的直接操作規則要求通過紅外線跟蹤系統持續檢測BFG。原因是,在企業投入生產運行后,不由IR系統的常設位置實現機器人的動作的位置,可形成這樣的可能性,即IR系統在空間的位置是自由且在機器人編程的過程中是可變化的和可進行選擇的。紅外線跟蹤系統位置的變化是在慣性以及慣性傳感器磁場數據的基礎上確定的。這樣便能夠徹底分離操作人員與工業機器人的運動范圍,從而能夠將操作人員受傷的風險降至最低。
研究人員在這些系統部件的基礎上研發出了操作人員與機器人各種互動的可能性,這些互動可能性可根據操作人員的狀況自由轉換接通。操作人員與機器人互動的各種可能模式如圖3所示。除了已經介紹的機器人動作的直接引導(如圖3A所示)外,操作人員同時還可以選擇機器人軸的專門動作(如圖3B所示),也就是能夠選擇機器人各個軸的轉動。

圖3 編程系統提供了各種不同互動的可能性
無論是直角坐標參考系控制模式還是軸專門控制模式,BFG和機器人凸緣之間的動作調節因素是可以調整的(如圖3C所示)。這種調節因素能轉換或是實現動作數據的轉換。在減速時,BFG的一個大動作僅導致生成機器人凸緣的一個小動作;在轉換時,一個小的動作規定值會傳遞給機器人凸緣的一個大動作。這樣,在臨界狀態時,如操作人員接近機器人夾鉗位置時機器人的準確定位,以及在非臨界狀態如在傳輸運動時,機器人便能夠快速運動。
在直角坐標參考系控制模式框架內存在著這樣的可能性,即將機器人的運動阻隔在一個具體的空間自由度范圍內(如圖3D所示)。這樣,同樣可借助于紅外線標記自由定位操作人員在一空間的機動坐標。沿著該坐標軸,既可傳輸式限定操作人員的動作又可循環的限定操作人員的動作。這樣,操作人員的動作只可沿著容許的坐標軸傳動給工業機器人。這樣,只可以進行如沿著機器人夾鉗表面或是垂直于機器人夾鉗的位置的精準動作。

圖4 自由定義坐標系以支持程序化過程
借助于各種不同的交互可能性,這種Prodemo-System便形成了滿足用戶要求的機器人操作任務的編程,如機器和設備在完成全部工件堆垛作業任務時機器人操作任務的編程。通過程序輔助,如移動(磁)坐標和實現簡單的TCP測量的可能性,可附帶實現機器人動作走向的透明度且增加這種機器人程序化的直觀性(圖4)。操作人員可單手操作BFG,這樣便簡化了存取BFG常用功能的操作,如無級調節減速比、開啟/關閉夾鉗或是存儲具體的運行軌跡點。這樣,操作人員便可不需要觀看顯示,從而能夠把注意力全部集中在他的編程任務方面。
在使用方面,除了使用相應品牌的攝像裝置外,僅需要為了實施所研發軟件的一個標準型筆記本電腦(Standard Laptop)(圖5)。除了前面已經介紹的具有調整操作人員和機器人互動模式的可能性外,實施研發的軟件包括用于確定程序結構的圖像化。在此,所儲存的點和已經設置的程序過程之后還可進行改變。而且進行改變時不需要為此直接連接機器人控制裝置。
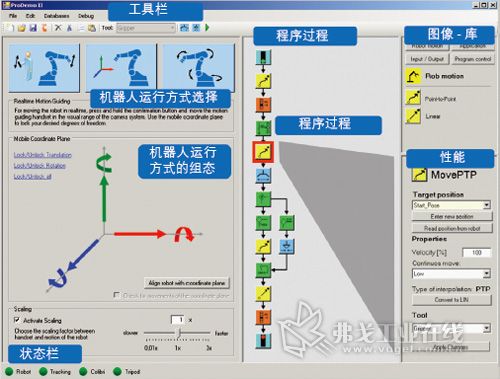
圖5 用于確定機器人運行形式和程序過程邏輯的操作人員操作控制表面
通過標準界面實現信息交換
在與運動引導裝置直接交互時,背景是軟件正在計算由機器人實施的動作,并將計算結果發送給機器人控制裝置。軟件和機器人控制裝置之間的信息交換,如動作和夾鉗的控制方面的信息交換通過在工業環境中專用的標準界面進行。由此,Prodemo-System原則上能夠用于任意的機器人運動和控制。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV
型號:配件HS13BX-1000 操作機構
價格:¥111.6
庫存:10
訂貨號:150002485
型號:配件HS13BX-400 操作機構
價格:¥133.8
庫存:10
訂貨號:150000416
型號:HR3-200/32BX 100A
價格:¥432.336
庫存:10
訂貨號:HR320032BX100
型號:配件DW15-630 操作機構
價格:¥201
庫存:10
訂貨號:150007145


